
Brian Beckman's:The Physics of Racing
 02-28-2014, 11:17 AM
02-28-2014, 11:17 AM
#1
Team Owner

Thread Starter
Member Since: Mar 2001
Location: Boston, Dallas, Detroit, SoCal, back to Boston MA
Posts: 30,607
Received 239 Likes
on
167 Posts

This is a real good read into the understanding what actually goes on when you race a car
He was driving a Corvette at the time he wrote it.
Brian Beckman's The Physics of Racing
http://phors.locost7.info/contents.htm
There's downloadable PDF's on the site.
He was driving a Corvette at the time he wrote it.
Brian Beckman's The Physics of Racing
http://phors.locost7.info/contents.htm
There's downloadable PDF's on the site.


 02-28-2014, 01:37 PM
02-28-2014, 01:37 PM
#4
Drifting

Man, I have been looking for that section about proving why hugging inside curb all the way around is not faster. I saw it once some time ago and could never find it again. Thanks!
02-28-2014, 07:22 PM
#5
Le Mans Master

This is a real good read into the understanding what actually goes on when you race a car
He was driving a Corvette at the time he wrote it.
Brian Beckman's The Physics of Racing
http://phors.locost7.info/contents.htm
There's downloadable PDF's on the site.
He was driving a Corvette at the time he wrote it.
Brian Beckman's The Physics of Racing
http://phors.locost7.info/contents.htm
There's downloadable PDF's on the site.
 03-01-2014, 10:31 AM
03-01-2014, 10:31 AM
#6
Team Owner
Thread Starter
Member Since: Mar 2001
Location: Boston, Dallas, Detroit, SoCal, back to Boston MA
Posts: 30,607
Received 239 Likes
on
167 Posts
The local SCCA came up with a handout that's also a good read
http://www.ner.org/sites/ner.org/fil...choolnotes.ppt
But there seems to be a contradiction.
NER SOLO handout last page
In Solo II, often a shorter line through a corner can be the fastest
So, the answer is, under the assumptions made, that the inside line is never better than the classic
racing line.
racing line.

 03-02-2014, 02:54 PM
03-02-2014, 02:54 PM
#8
Team Owner
Thread Starter
Member Since: Mar 2001
Location: Boston, Dallas, Detroit, SoCal, back to Boston MA
Posts: 30,607
Received 239 Likes
on
167 Posts
Reading his later chapters, he's optimizing total time on the track by setting up faster times on the straights.
Since we're dealing with cones and not curbs we can get real close, the smallest radius being dictated by the turning radius of the particular car you drive.
or course since
a=v^2/r
or
v=sqrt(a*r)
you're going a lot SLOWER even though you change direction FASTER
If that leads into another turn, that's not necessarily a bad thing.
If it lead onto a straight, that's another matter, but there's not too many long straights autocrossing.
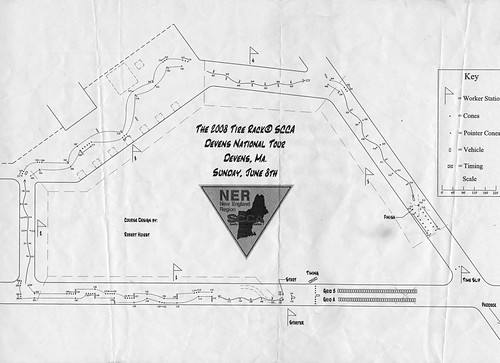
I found an old Devens National Tour course map
I think I'll punch it into my CAD program and see what I come up with using his calculations
Since we're dealing with cones and not curbs we can get real close, the smallest radius being dictated by the turning radius of the particular car you drive.
or course since
a=v^2/r
or
v=sqrt(a*r)
you're going a lot SLOWER even though you change direction FASTER
If that leads into another turn, that's not necessarily a bad thing.
If it lead onto a straight, that's another matter, but there's not too many long straights autocrossing.
I found an old Devens National Tour course map
I think I'll punch it into my CAD program and see what I come up with using his calculations
03-03-2014, 08:51 PM
#9
Team Owner
Thread Starter
Member Since: Mar 2001
Location: Boston, Dallas, Detroit, SoCal, back to Boston MA
Posts: 30,607
Received 239 Likes
on
167 Posts
Doing some physics analysis to see if I can improve my times at the autocross.
1st run through is a simple circle.
1 foot/second = 0.682 mile/hour (mph)
lateral G
Assuming:
1 G lateral grip
1 G braking max
and
1 G acceleration, keeps it simple and it matches my 60ft times.
a=v^2/r
a*r=v^2
v=sqrt(a*r)
Gives me the max speed in a turn
c=2*pi*r
t=c/v
Give me the distance covered and the time it takes to cover it.
As predicted the smaller the circle the better for turning direction, though the speed is kept low.

Next up, A SIMPLE SLALOM.
The curve is dictated by how far the cones are set apart, the width of the car, and how close the driver can get to the cone.

I ran three slaloms 25ft, 50ft, and 100ft separation.
with the car's center being 4ft and 3.5ft from the cone @ apex.
As you can see being closer to the makes a big difference.
The distance is about the same, but the speed is higher.

Next up, AN S TURN
I first calculated the distance between the cones as a reference even though you could never make the corner that way, it shows what the absolute minimum distance would be.
Next I used an s-curve to find out what the max radius the element could be taken
This gives the speed that would be used throughout the element.
It also gives the entrance and exit speeds
The car's turning radius gives the path with the shortest drivable distance.
A straight is used to connect the two curves.
The turning radius give the max speed in those two curves, the entrance and exit speeds.
The straight line between is used for acceleration and then braking.
I also ran a curve with slightly wider turns at the corners.
Times are then calculated.



1st run through is a simple circle.
1 foot/second = 0.682 mile/hour (mph)
lateral G
Assuming:
1 G lateral grip
1 G braking max
and
1 G acceleration, keeps it simple and it matches my 60ft times.
a=v^2/r
a*r=v^2
v=sqrt(a*r)
Gives me the max speed in a turn
c=2*pi*r
t=c/v
Give me the distance covered and the time it takes to cover it.
As predicted the smaller the circle the better for turning direction, though the speed is kept low.
Next up, A SIMPLE SLALOM.
The curve is dictated by how far the cones are set apart, the width of the car, and how close the driver can get to the cone.
I ran three slaloms 25ft, 50ft, and 100ft separation.
with the car's center being 4ft and 3.5ft from the cone @ apex.
As you can see being closer to the makes a big difference.
The distance is about the same, but the speed is higher.
Next up, AN S TURN
I first calculated the distance between the cones as a reference even though you could never make the corner that way, it shows what the absolute minimum distance would be.
Next I used an s-curve to find out what the max radius the element could be taken
This gives the speed that would be used throughout the element.
It also gives the entrance and exit speeds
The car's turning radius gives the path with the shortest drivable distance.
A straight is used to connect the two curves.
The turning radius give the max speed in those two curves, the entrance and exit speeds.
The straight line between is used for acceleration and then braking.
I also ran a curve with slightly wider turns at the corners.
Times are then calculated.
03-04-2014, 11:21 AM
#11
Team Owner
Thread Starter
Member Since: Mar 2001
Location: Boston, Dallas, Detroit, SoCal, back to Boston MA
Posts: 30,607
Received 239 Likes
on
167 Posts
The 20ft turning radius is for a minimum distance calculation, a course designated by a single cone.
I have an older version of his book, and I do plan on adding more to the models
Forgetting Beckman's math not taking into account contact patch area.
This statement struck me as rather odd.
I have an older version of his book, and I do plan on adding more to the models
Forgetting Beckman's math not taking into account contact patch area.
This statement struck me as rather odd.
The maximum acceleration a tyre can take is μg, a constant, independent of the mass of the car! While
the maximum force a tyre can take depends very much on the current vertical load or weight on the
tyre, the acceleration of that tyre does not depend on the current weight. If a tyre can take one g before
sliding, it can take it on a lightweight car as well as on a heavy car, and it can take it under load as well
as when lightly loaded.
the maximum force a tyre can take depends very much on the current vertical load or weight on the
tyre, the acceleration of that tyre does not depend on the current weight. If a tyre can take one g before
sliding, it can take it on a lightweight car as well as on a heavy car, and it can take it under load as well
as when lightly loaded.